

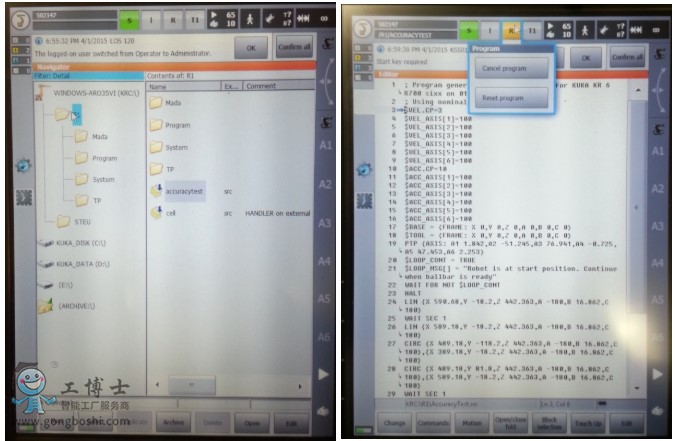
1. 从KRC存储单元中选择一个程序
2. 选择屏幕上的选择
3. 选择按钮“ R ”(顶部)并重置程序
4. 通过选择示教器上的绿色“播放”按钮来启动程序
焊接机器人:
现在机器人能很轻松的完成两类性质的焊接作业,即点焊和弧焊。由于要连在一起的金属部件形状可能很不规则,常常要求有一只灵活的机械手腕。弧焊机器人主要应用于各类汽车零部件的焊接生产,主要有熔化极焊接作业和非熔化极焊接作业两种类型。
焊接机器人的特殊技术指标
1)适用的焊接或切割方法这对于弧焊机器人特别重要。这实质上反映了机器人控制和驱动系统的抗干扰能力。目前,一般的弧焊机器人只使用MIG焊接方法,因为这些焊接方法不需要使用高频电弧点火,机器人的控制和驱动系统没有特殊的抗干扰措施,可以使用钨极氩弧焊焊接。该机器人是近年来的新产品,它具有一套特殊的抗干扰措施。选择机器人时应注意这一点。
2)摆动功能这对于弧焊机器人非常重要,它与弧焊机器人的工艺性能有关。目前,电弧焊机器人的摆动功能已经非常不同。有些机器人只有几种固定的摆动模式,有些机器人只能在xy平面上任意设置摆动模式和参数。佳选择是能够在空间(xy,z)中移动。在该范围内任意设置摆动模式和参数。
3)焊接用户点示教功能这是在焊接示教中非常有用的功能,即在进行焊接示教时,首先示教焊缝上某个点的位置,然后调节焊或焊钳的姿势。调整姿势时,原始示教点的位置完全不变。实际上,机器人可以自动补偿由于姿势的调整而导致的住家点的位置变化,并确保住家点的坐标以方便教学操作者。
4)焊接过程故障的自检和自处理功能。这是指焊接过程中常见的故障,例如电弧焊的粘丝,断丝,点焊的粘焊条等。这些故障发生后,如果不及时采取措施,将会造成机器人损坏等重大事故。或出现报废零件。因此,机器人必须具有检测此类故障并自动实时停止和报警的功能。
了解更多库卡机器人
文章来源网络,如有侵权请联系删除