

①安全监控能满足 16 个用户自定义的与轴相关的或笛卡尔监控空间
②安全监控用户自定义的单元范围
③在到达区域边界前制动 (BBRA)
④安全监控与轴相关的速度
⑤安全监控空间特有的速度
⑥安全监控笛卡尔速度
⑦可用安全的 TCP 为***多 16 件安全工具制作模型
⑧可利用安全控制系统实现安全停止
⑨***多 6 个轴组的安全运行停止
⑩可连接到上级控制系统,例如安全 PLC
用于激活监控的安全输入端
监控状态信息的安全输出端
用于验证零点标定的可配置程序
通过 KUKA 参考点开关进行零点复归测试
通过外部系统以及借助外部零点标定确认进行零点复归测试
在进行零点复归测试时,在合适的参考点位置上检查所保存的轴电机参考点位置是否与该轴的实际机械位置一致。

一、发生以下事件后需要进行零点复归测试:
①机器人控制系统重启(内部要求)
②重新调整机器人(内部要求)
③重新配置 E/A-驱动程序(内部要求)
④仅在通过参考点开关进行零点复归测试时有关:外部输入端
$MASTERINGTEST_REQ_EXT,例如由 PLC(外部要求)
在内部要求零点复归测试时,机器人控制系统发出以下信息: 必须进行调零(内部) 。机器人在未进行零点复归测试和零点标定确认的情况下可继续运行2 小时(监控时间)。
监控时间过后,库卡机器人以安全停止 1 停下,机器人控制系统发出以下确认信息: 确认调零时间间隔已过 。确认后,机器人还能继续运行 2 小时。
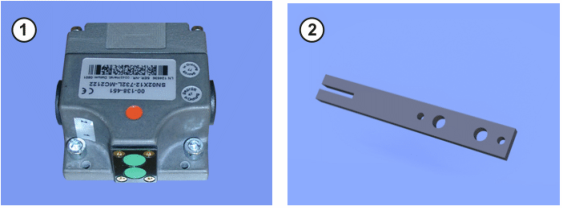
二、硬件—参考点开关组件
参考点开关组件由以下元件组成:
①电感式参考点开关 XS Ref; ②直形或弯型触发板
③参考点开关连接导线 X42 - XS Ref;④参考点开关插头 X42
在零点复归测试时驶至特定的参考点位置,并借助参考点开关检查机器人和特定附加轴的实际位置是否与安全配置中示教的参考点位置一致。如果当前位置与参考点位置的偏差过大,则零点复归测试失败。机器人通过安全停止 1 停止,并且只能在 T1 运行方式下运行。
1、安装并连接参考点开关组件
2、配置输入信号$MASTERINGTEST_REQ_EXT。
该信号用于零点复归测试外部要求的输入信号,已在目录 KRC:\ROBOTER\ KRC\STEU\MADA 下的文件$machine.dat 中进行了声明且必须分配给一个合适的输入端。默认设置下,信号位于 $IN[1026]。
3、 在文件“masref_user.dat”和安全配置中配置待检查的参考点组。
4、在程序“masref_user.src”中示教零点复归测试位置。
5、在参考点开关被工具的铁磁体部分触发时或在更换工具之后:检查参考点位置的准确度。
6、手动启动零点复归测试:手动启动程序“masref_main.src”。
选择程序“masref_main.src”并运行至程序结束。
该程序在目录R1\System下。
了解更多库卡机器人

文章来源网络,如有侵权请联系删除